
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
Tags
- isaac sim
- isaac gym
- 3d 포인트클라우드
- product hunt
- 포인트 클라우드
- ros2 bridge
- ground truth
- object detection
- rtx 50 series
- isaac sim rtx 50
- 포인트클라우드 사용
- 5090
- 포인트클라우드 활용
- 성능평가방법
- 렌더링 품질
- 포인트클라우드
- 경사하강법
- precision-recall
- script editor
- 3d 데이터
- isaac-sim
- isaac sim 50시리즈 이슈
- nVidia
- simulation
- 협동로봇
- ROS2
- Mean Average Precision
- 포인트클라우드 예시
- isaac lab
- Isaac
Archives
- Today
- Total
Everything is NORMAL
0. Isaac Sim이란? 로봇 개발자들이 주목하는 시뮬레이터 본문
| 로봇 시뮬레이션, 이제는 Isaac Sim의 시대!
시작하며: 왜 Isaac Sim인가?
- 저는 현재 Unitree Go2 로봇을 활용한 로봇 제어 S/W를 개발하고자 하는 로봇개발 초보자입니다.
- 로봇을 실제 환경에서 테스트하려면 다양한 변수(장애물, 위치 인식, SLAM 등)을 고려해야 합니다.
- 이를 반복적으로 실험하려면 안정적인 시뮬레이션 환경이 꼭 필요합니다.
- 2025년 7월 기준, 시뮬레이션 툴 중에서 가장 유망하다고 평가받는 Isaac Sim에 대해 알아보고, 실제 활용해보려 합니다.

Isaac Sim과 더불어 다른 대표적인 로봇 시뮬레이터는 무엇이 있을까요?
1. RoboDK: 산업용 로봇 오프라인 프로그래밍 시뮬레이터

- 개요
- RoboDK는 산업용 매니퓰레이터(팔 로봇)를 위한 오프라인 프로그래밍(OLP) 및 시뮬레이션 소프트웨어입니다.
- 400개 이상의 실제 산업용 로봇 모델(UR, FANUC, KUKA, Yaskawa 등)을 지원하며, 실제 로봇과 동일한 경로 및 코드를 시뮬레이션할 수 있습니다.
- 주요 기능
기능 설명 OLP 지원 로봇 경로 계획, 절삭, 용접, 도장, 조립 등 로봇 모델 UR, FANUC, KUKA, ABB, Yaskawa 등 400+ 기종 CAD 연동 SolidWorks, Fusion 360, Inventor 등 후처리기 실제 로봇용 코드(Post Processors) 자동 생성 운영체제 Windows, macOS, Linux, Android API Python(권장), C++, C#, VB.NET, Matlab 시뮬레이션 자동화 GUI 기반 자동화 + 스크립트 기반 제어 풍부한 예제 다양한 산업별 예제 제공 - 한계점
기능 설명 동역학(Dynamics) 미지원 운동학(Kinematics) 중심으로, 물리 기반 움직임 (걷기, 균형, 점프 등) 불가 센서 미지원 LiDAR, 카메라, IMU 등의 센서 시뮬레이션 미지원 실시간 제어 파이썬 스크립트는 가능하나, ROS2 연동/실시간 제어에는 한계 있음 복잡한 자세 제어 제한 다관절 로봇(4족보행/휴머노이드)의 복잡한 자세 제어 어려움 물리 엔진 부재 Isaac Sim, Gazebo처럼 충돌/중력/마찰 계산 없음
2. Gazebo: ROS 공식 시뮬레이터

- 개요
- 다양한 로봇 환경과 물리 기반 시뮬레이션을 제공하는 범용 오픈소스 로봇 시뮬레이션 플랫폼입니다.
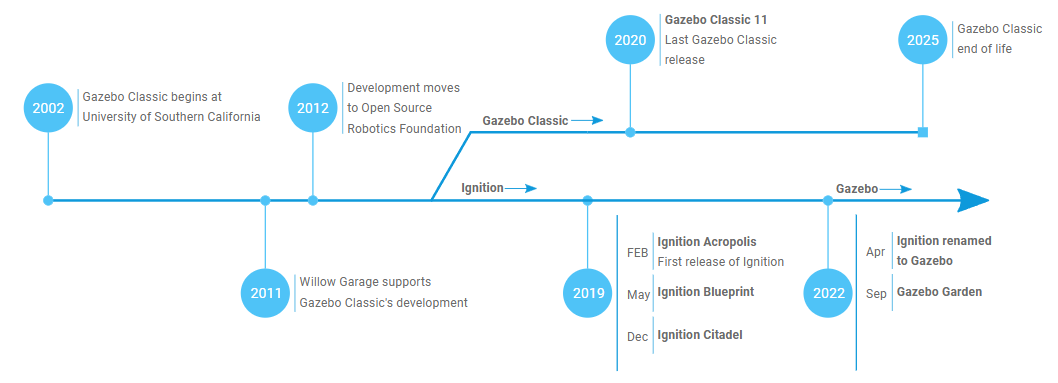
- 2002년에 시작되어, 대대적인 업그레이드와 현대화를 거쳐 2022년 이전까지를 Gazebo Classic으로 명명하고, 새로운 브랜드네임으로 Ignition 이라는 브랜드를 지정하기도 하였습니다.
- 하지만, 브랜드네임의 상표 관련 문제로 다시 Gazebo라는 이름으로 돌아오게 되었습니다.
- Gazebo Classic은 최신 Gazebo 라이브러리가 개발되기 전의 Gazebo 버전입니다. 클래식 버전은 주 버전 번호가 0에서 11 사이인 숫자입니다.
- 공식 발언은 찾지 못했으나, Gazebo Sim 이라는 이름을 공식 명칭으로 사용하려는 것처럼 보입니다. (공식 홈페이지가 gazebosim.org로 등록되어 있음)
- 주요 특징
- 성능 최적화
기능 설명 분산 시뮬레이션 여러 서버에서 연산을 분산 실행하여 성능 향상 (Performer 단위 병렬 처리) 동적 자산 로딩 공간 정보를 기반으로 시뮬레이션 중 필요할 때만 자산 로딩/언로딩하여 메모리 효율 극대화 성능 조절 타임스텝 조정으로 실시간, 빠른 배속, 느린 배속 등 시뮬레이션 속도 제어 가능
- 플랫폼 및 통합성
기능 설명 크로스 플랫폼 Linux, macOS에서 안정적으로 사용 가능 (Windows는 제한적이나 향후 개선 예정) 클라우드 통합 app.gazebosim.org에서 모델/월드 관리, 다운로드, 공유 가능ROS 통합 ROS ↔ Gazebo 브리지를 통해 메시지 자동 변환 (Protobuf ↔ ROS msg)
- 정밀 시뮬레이션
기능 설명 정확한 물리 엔진 DART 기본, Bullet/ODE 등 선택 가능 (게임 엔진보다 높은 정확도) 센서 모델링 카메라, 깊이카메라, LiDAR, IMU, 자이로, 고도계, 자기계 등 다양한 센서 + 노이즈 모델 적용 고급 렌더링 Ogre 2.1 기반: 그림자 맵, PBR 재질, 실시간 최적 렌더링 파이프라인 제공
- 유연한 확장성
기능 설명 플러그인 시스템 물리/렌더링/GUI 모두 플러그인 기반 구조로 커스텀 코드 연동 가능 시뮬레이션 시스템 플러그인 사용자 정의 시뮬 시스템을 로딩해 실시간으로 시뮬레이션 상태 관찰/제어 가능 비동기 통신 (IPC) ZeroMQ + Protobuf 기반 메시지 시스템 (빠르고 효율적, Named topic 구조 지원)
- 툴과 인터페이스
| 기능 | 설명 |
|---|---|
| CLI (gz) | 토픽/메시지 탐색, 실행, 로깅 등 다양한 명령어 제공 |
| GUI (QtQuick) | 시뮬레이션 시각화, 토픽 시청, 환경 제어 등 플러그인 기반 시각화 |
| Web 인터페이스 | 클라우드에서 자산 검색/관리/팀 협업/시뮬 대회 참가 등 가능 |
RoboDk와 Gazebo 이외에도, 로봇 개발을 하다보면 다음과 같은 시뮬레이터들을 접하게 됩니다:
RoboDK
– 산업용 팔 로봇 중심, 가공 경로 시뮬레이션
Gazebo
– ROS 통합 최강, 범용 로봇 시뮬레이션
Unity Robotics
– 고급 시각화 + 커스터마이징
MuJoCo
– 강화학습 + 휴머노이드 특화
Webots
– 입문자 친화적인 교육용 시뮬
각자 강점이 다르고, 목적에 따라 선택이 달라집니다.
제가 개발 중인 프로젝트는 Unitree Go2를 활용해 다음을 구현하는 것입니다:
- SLAM 기반 자율 패트롤 시뮬레이션
- 센서 기반 로봇 제어 및 학습 환경 테스트
- 향후 강화학습 적용 및 실로봇 연동 가능성 고려
✅ 4족보행
✅ LiDAR, IMU 등 센서 시뮬레이션
✅ 동역학 기반 시뮬레이션
✅ ROS2 연동
✅ 추후 AI 연계 확장성
| 조건 | 필요 | Isaac Sim 만족 여부 |
|---|---|---|
| 4족보행 로봇 제어 | ✅ 필요 | ✅ 지원 |
| 센서 시뮬레이션 (LiDAR, IMU, RGBD) | ✅ 필요 | ✅ 고정밀 지원 |
| 동역학 기반 시뮬레이션 | ✅ 필수 | ✅ PhysX 기반 정밀 계산 |
| ROS2 연동 | ✅ 필요 | ✅ 공식 Bridge 제공 |
| 고급 렌더링 | 시각화 분석 용이 | ✅ RTX + PBR 지원 |
| 강화학습 연계 | 향후 확장용 | ✅ Isaac Lab / Orbit 등 연계 |
Isaac Sim은 단순 시뮬레이터가 아니다
NVIDIA Isaac Sim은 단순한 로봇 시뮬레이터가 아니라,
AI 기반 로봇의 개발부터 시뮬레이션, 데이터 생성, 학습, 디지털 트윈 운영까지 전 주기를 지원하는 Omniverse 기반 로보틱스 플랫폼입니다.
Isaac Sim의 3단계 철학

1. Design – 설계와 통합
- Onshape, URDF, MJCF 등 다양한 로봇 설계 포맷 지원
- 모든 환경은 Pixar의 USD(Universal Scene Description) 기반으로 통합
- GUI와 Python API를 통해 로봇, 월드, 센서, 태스크 구성
2. Tune & Train – 정밀 시뮬레이션 및 학습
- PhysX 기반 고정밀 동역학 시뮬레이션
- RTX 센서 시뮬레이션 (카메라, LiDAR, IMU, 접촉센서 등)
- Replicator: 합성 데이터 생성 툴킷
- OmniGraph: 노드 기반 환경 제어 시스템
- Isaac Lab: 강화학습 환경 구축 및 Cloner API
- 실제 로봇 없이 전체 파이프라인 사전 시뮬 가능
3. Deploy – 실로봇 연결 및 운영
- ROS2 Bridge 및 Isaac ROS 패키지 지원
- 디지털 트윈 시나리오 적용 가능 (물류창고, 지능형 맵핑 등)
- Omniverse 기반 GUI/파일 관리 API, Python/C++ 확장성
| 항목 | Isaac Sim | Gazebo | Unity | MuJoCo | RoboDK |
| 시뮬 범위 | 설계 |
주로 ROS 기반 센서/이동 | 시각화/인터랙션 중심 | 강화학습/휴머노이드 | 산업용 로봇 경로계획 |
| 물리 엔진 | ✅ PhysX (GPU 기반 고정밀) | ODE/DART/Bullet | Unity PhysX (보통 정밀) | 고정밀 독자 엔진 | ❌ 없음 |
| 센서 시뮬레이션 | ✅ RTX 기반 다중 센서 | ✅ 다양 | ⚠️ 직접 구현 | ❌ 없음 | ❌ 없음 |
| ROS2 연동 | ✅ 공식 Bridge + Isaac ROS | ✅ 우수 | ⚠️ 외부 커넥터 필요 | ⚠️ 제한적 | ⚠️ 거의 없음 |
| 강화학습 지원 | ✅ Isaac Lab + Cloner | ⚠️ 간접 가능 | ⚠️ 직접 구성 필요 | ✅ MuJoCo + RL 전용 | ❌ 없음 |
| 사용자 확장성 | Python/C++ + USD 기반 | C++/ROS plugin | C#/C++/Unity SDK | Python/C++ | Python API 위주 |
| 디지털 트윈 구성 | ✅ 물류창고, 로봇팔, 맵핑 등 | ⚠️ 가능하나 수동 구성 | ⚠️ 복잡 | ⚠️ 비적합 | ❌ 비적합 |
Isaac Sim은 다음과 같은 사람에게 최고의 선택입니다:
- 센서 기반 정밀 시뮬레이션이 필요한 경우
- SLAM, 패트롤, 자율주행 테스트를 가상 환경에서 하고 싶은 경우
- 강화학습 또는 합성 데이터 기반 학습이 필요한 경우
- ROS2를 실로봇에 연동해 Sim-to-Real 실험까지 하고 싶은 경우
- 디지털 트윈 기반 로봇 시스템을 기획 중인 경우

✍️ 정리
수많은 시뮬레이터가 있지만, 동역학 정확도, 센서 정밀도, 시각화, ROS2 연동, 향후 AI 확장성까지 모두 만족하는 도구는 결국 Isaac Sim이었습니다.
이제부터 Isaac Sim의 설치 및 활용에 대해 알아볼 것입니다.
'개발 > Isaac Sim 4.5.0' 카테고리의 다른 글
| 4. Isaac Sim(4.5.0)과 ROS2 연동 설치 가이드 (2) | 2025.07.25 |
|---|---|
| Isaac Sim 4.5.0 RTX 50 시리즈에서 렌더링 품질 이슈 (0) | 2025.07.18 |
| 3. Isaac Sim Tutorial: Script Editor Extension으로 첫 시뮬레이션 하기 (0) | 2025.07.18 |
| 2. Isaac Sim Tutorial: GUI로 첫 시뮬레이션 하기 (1) | 2025.07.18 |
| 1. Isaac Sim 설치하기 (1) | 2025.07.18 |
'개발/Isaac Sim 4.5.0' Related Articles
more




Comments