
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
Tags
- 3d 포인트클라우드
- 포인트클라우드 활용
- 경사하강법
- 성능평가방법
- Mean Average Precision
- precision
- IOU
- PCL
- 자율주행
- ground truth
- 포인트 클라우드
- gradient
- 협동로봇
- 기술 트렌드
- MSE
- 테슬라
- PCD
- recall
- IT 트렌드
- 3d 데이터
- object detection
- precision-recall
- Point Cloud
- product hunt
- POINT
- 포인트클라우드
- product
- 머신러닝
- 포인트클라우드 예시
- 포인트클라우드 사용
Archives
- Today
- Total
Everything is NORMAL
포인트 클라우드, 로봇 혁신을 이끄는 활용 사례 TOP 5 본문
로봇 공학이 환경을 이해하고, 스스로 움직이며, 정밀한 작업을 수행하는 비결은 어디에 있을까요?
그 중심에는 바로 포인트 클라우드 기술이 있습니다. 3D 데이터를 통해 로봇은 물리적 세계를 디지털화하고, 이를 활용해 새로운 가능성을 열어갑니다.
오늘은 포인트 클라우드가 로봇을 어떻게 변화시키고 있는지, 가장 흥미로운 활용 사례 5가지를 통해 살펴보겠습니다. 이 기술이 로봇 공학의 미래를 어떻게 이끌어 가고 있는지 지금 바로 확인해보세요!
로봇 공학에서 포인트 클라우드가 중요한 이유
포인트 클라우드는 로봇이 물리적 세계를 이해하고 상호작용할 수 있는 핵심 기술입니다. 복잡한 환경에서 로봇은 3D 데이터를 통해 주위 물체를 인식하고 작업 경로를 계획하며 정밀한 조작을 수행합니다.
- 포인트 클라우드 데이터: 3D 스캔을 통해 생성된 포인트 클라우드 데이터 이미지 (나무, 건물, 차량 등).
- LiDAR 장비를 장착한 로봇: LiDAR 센서를 사용해 주위 환경을 스캔하는 자율 로봇.

1. 자율 네비게이션 (Autonomous Navigation)
사용 시나리오
- SLAM (Simultaneous Localization and Mapping):
- SLAM 기술은 로봇이 동시에 자신의 위치를 추적(Localization)하고 주변 환경의 3D 맵을 작성(Mapping)할 수 있도록 합니다.
- 포인트 클라우드는 LiDAR, RGB-D 카메라, 스테레오 카메라 등에서 생성된 데이터를 기반으로 실시간으로 지도를 작성합니다.
- 이 기술은 복잡한 환경(예: 창고, 공장, 도시 도로)에서 로봇이 자율적으로 탐색하도록 합니다.
- 경로 계획(Path Planning):
- 포인트 클라우드를 활용하여 로봇이 이동 가능한 공간(Navigable Space)을 탐지하고, 장애물을 피하며 최적의 경로를 계산합니다.
- 좁은 공간, 복잡한 지형에서도 안정적인 이동이 가능하게 합니다.
- 장애물 회피(Obstacle Avoidance):
- 로봇이 실시간으로 포인트 클라우드를 분석하여 고정된 물체(벽, 가구 등)와 움직이는 물체(사람, 차량 등)를 탐지하고 회피합니다.
예제
- 자율주행 차량:
LiDAR를 통해 포인트 클라우드를 생성하여 도로의 차선, 표지판, 차량, 보행자 등을 탐지하고 경로를 계획합니다.- Tesla, Waymo와 같은 자율주행 차량은 LiDAR와 카메라의 데이터를 결합하여 3D 환경을 실시간으로 분석합니다.
- 자율 이동 로봇(AMR):
물류 창고에서 포인트 클라우드를 사용하여 로봇이 물품을 옮길 최적의 경로를 계획하고, 장애물을 회피합니다.- 예: Amazon의 Kiva 로봇.
- 드론 기반 네비게이션:
드론이 복잡한 건축 환경이나 자연 환경에서 포인트 클라우드를 활용하여 충돌을 방지하며 자율 비행합니다. - 농업 로봇:
농장에서 자율적으로 이동하며 작물의 상태를 분석하고, 장애물을 회피하며 정해진 경로를 따라 작업을 수행합니다.
사용 기술
- LiDAR 기반 SLAM:
- LiDAR 센서를 통해 포인트 클라우드를 생성하고, 고정밀 환경 맵을 작성합니다.
- 장점: 높은 정밀도, 긴 탐지 거리.
- RGB-D 카메라 기반 SLAM:
- RGB와 깊이 정보를 동시에 사용하여 물체와 공간의 형상을 인식.
- 장점: 비용 효율적, 실내 환경에서 유용.
- SLAM 알고리즘:
- GMapping: 2D 환경에서 실시간 맵 생성.
- Cartographer: Google에서 개발한 2D/3D SLAM 라이브러리.
- RTAB-Map: RGB-D 카메라와 LiDAR 데이터를 통합하여 대규모 환경에서도 정확한 3D 맵 생성.
- 경로 계획 알고리즘:
- Dijkstra's 알고리즘: 특정 환경에서 가장 효율적인 경로를 계산.
- RRT (Rapidly-Exploring Random Tree): 복잡한 지형에서 최적 경로 탐색.
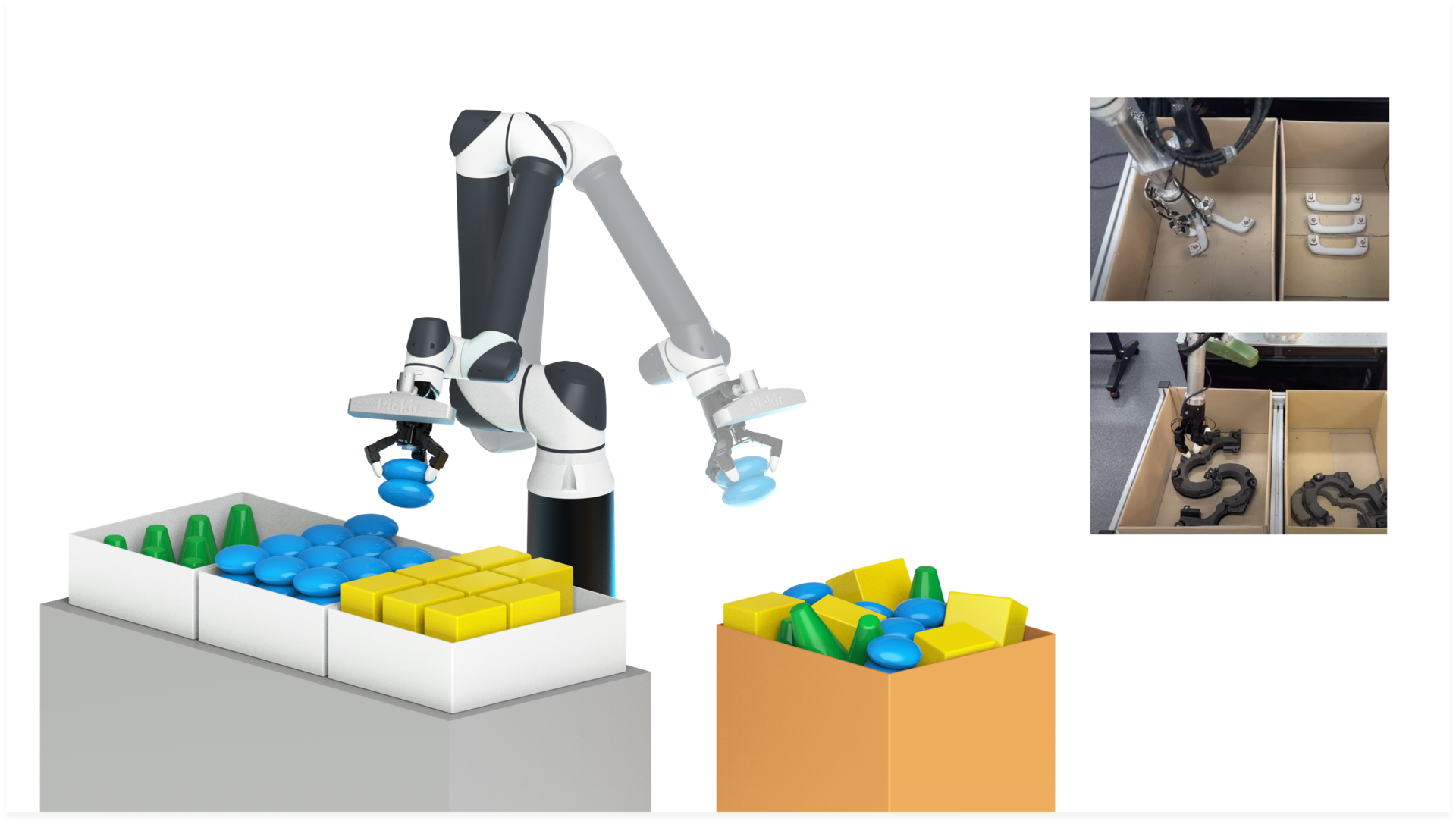
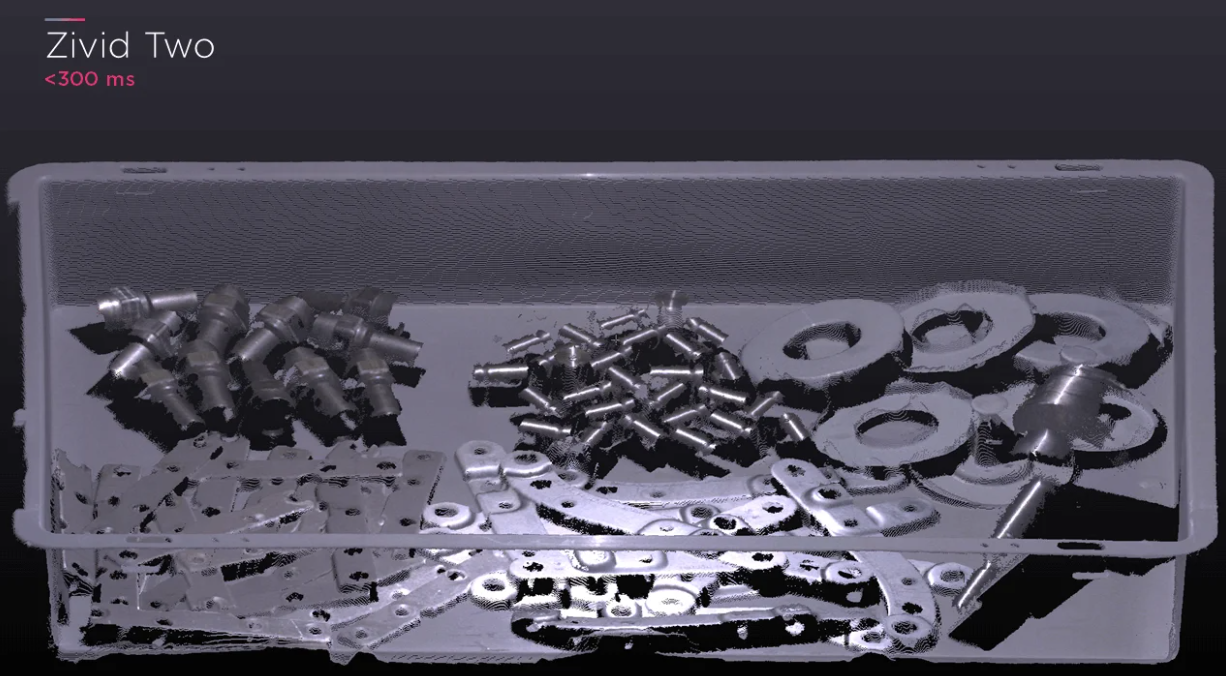
2. 물체 탐지 및 피킹 (Object Detection and Picking)
사용 시나리오
- 포인트 클라우드를 통해 물체의 위치와 형상을 인식하여 로봇 팔이 물체를 잡을 수 있도록 도움.
- 불규칙한 형상의 물체를 정확히 파악하여 그리퍼의 적절한 위치와 방향을 계산.
예제
- Bin Picking: 로봇 팔이 무작위로 쌓인 물체(예: 나사, 부품)를 포인트 클라우드를 분석하여 집어냅니다.
- 포인트 클라우드 기반 Grasp Planning: 물체 표면의 3D 데이터를 분석하여 안정적인 그리핑(잡기) 위치를 계산합니다.
사용 기술
- PCL(Point Cloud Library)로 물체 분할 및 표면 분석.
- Open3D 또는 MoveIt 같은 프레임워크로 그리핑 경로 계획.
3. 환경 인식 (Environment Perception)
사용 시나리오
- 로봇이 작업 환경에서 주요 객체나 특징을 식별하고 분석하여 작업에 필요한 정보를 얻습니다.
- 복잡한 작업 환경(예: 공장, 건설 현장)에서는 포인트 클라우드를 활용해 3D 맵을 생성하고 이를 시각화하여 환경을 직관적으로 분석할 수 있습니다.
예제
- 장애물 탐지: 로봇이 포인트 클라우드를 사용하여 동적 또는 정적 장애물을 탐지하고 회피합니다.
- 작업 영역 분할: 작업 환경을 분석하여 특정 관심 영역(ROI)을 식별하고 작업에 집중.
사용 기술
- Segmentation 알고리즘:
- RANSAC (Random Sample Consensus):
포인트 클라우드 데이터에서 평면, 곡면 등 주요 기하학적 요소를 추출하여 환경을 나눕니다. - Region Growing:
비슷한 속성(위치, 색상, 노멀 벡터)을 가진 포인트를 그룹화하여 관심 영역을 분리합니다.
- RANSAC (Random Sample Consensus):
- 딥러닝 기반 물체 분류:
- PointNet: 포인트 클라우드를 입력받아 3D 객체를 분류하거나 세그먼트화합니다.
- PointCNN: CNN 기반으로 포인트 클라우드의 지역적 특징을 학습하여 물체를 정밀하게 분류합니다.
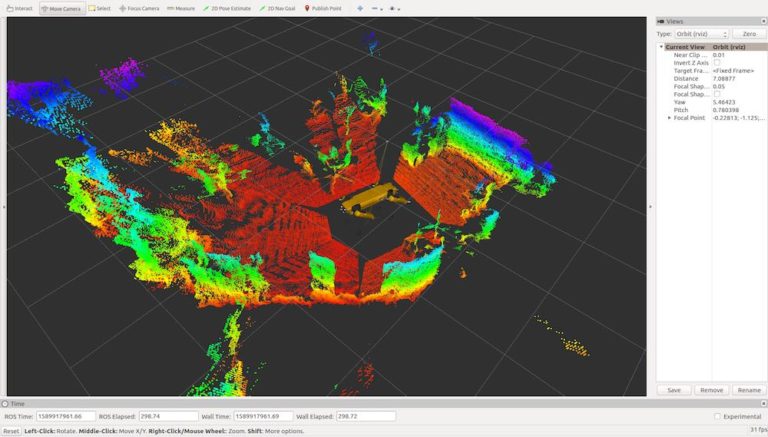
- 시각화 도구 및 기술:
- Open3D: 포인트 클라우드를 렌더링하고, 세그먼트화된 데이터를 3D로 시각화합니다.
- PCL (Point Cloud Library): 포인트 클라우드 데이터를 처리 및 시각화하며, ROI를 강조하거나 색상 코딩을 통해 분석 결과를 쉽게 이해할 수 있도록 도와줍니다.
- ROS Rviz: 로봇의 센서 데이터와 포인트 클라우드를 실시간으로 통합하여 3D 환경을 시각적으로 보여줍니다.
4. 정밀 조작 (Precise Manipulation)
사용 시나리오
- 로봇이 포인트 클라우드를 통해 물체의 위치, 자세, 형상을 분석하여 정밀한 작업(예: 삽입, 조립)을 수행합니다.
- 산업용 제조, 물류, 의료 등 다양한 분야에서 활용되며, 작업의 정확성과 효율성을 크게 향상시킵니다.
예제
- 문 열기: 로봇의 카메라로 손잡이의 위치를 2D/3D로 분석하고, 이를 기반으로 팔의 움직임을 제어합니다. 손잡이의 위치와 거리 데이터를 계산하고, 사전 정의된 Trajectory(경로)를 기반으로 문 손잡이를 잡고 돌린 후, 문을 당기거나 밀어 여는 동작을 수행합니다.
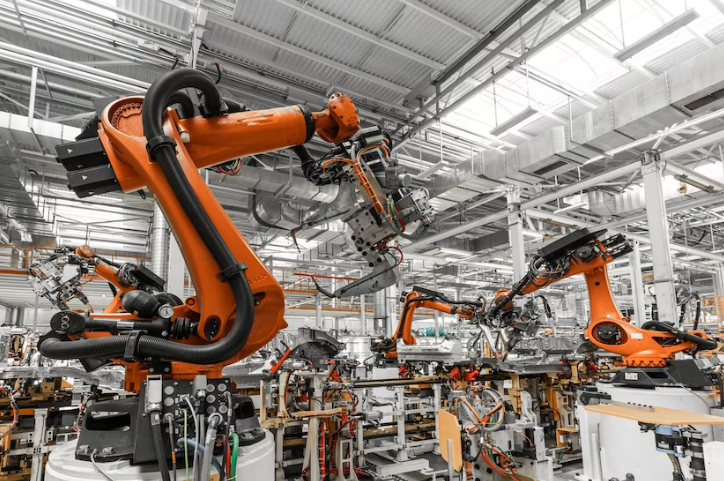
- 조립 작업: 로봇이 포인트 클라우드를 통해 부품을 정확히 맞추고 조립합니다. 자동차 제조 공정에서 로봇 팔이 기어박스를 조립하거나, 가전제품 생산 라인에서 부품을 정밀하게 삽입. 부품의 위치와 방향을 인식하고, 적합한 힘과 각도로 조립을 완료합니다.
사용 기술
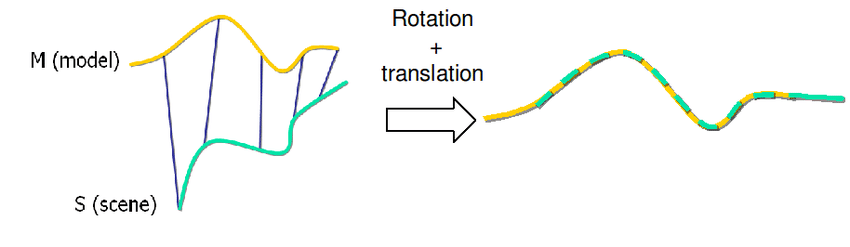
- 포인트 클라우드 정렬 (Alignment):
포인트 클라우드 데이터를 기반으로 물체의 3D 좌표와 자세를 정렬하여 정밀한 위치 제어를 수행합니다.- 자동차 부품의 정확한 조립 위치 계산.
- 표면 결함 위치를 파악해 자동 보정.
- 3D 객체 탐지 및 자세 추정:
- 딥러닝 모델(예: PointNet, PointCNN)을 사용하여 포인트 클라우드로 물체를 탐지하고 자세를 추정합니다.
- 컨베이어 벨트 위의 물체를 실시간으로 추적하고 처리.
- 정밀 궤적 생성:
로봇의 움직임을 미리 계획하고, 장애물을 피하며 목표물에 접근하여 작업을 수행.- 부품 삽입 과정에서 힘과 각도를 정밀하게 조정.
- 물체의 무게나 재질에 따라 맞춤 동작 수행.
- 시각화 및 피드백:
- 작업 과정을 실시간으로 시각화하여 진행 상태를 모니터링.
- 오류나 이상이 발생할 경우 자동으로 조정하거나 재작업 수행.
5. 로봇 협업 (Collaborative Robotics)
사용 시나리오
- 협동 로봇(Cobot)이 포인트 클라우드를 활용하여 작업 환경과 인간의 위치를 감지하고 협력 작업을 수행.
- 사람과의 충돌을 방지하거나 사람의 움직임을 따라 작업.
예제
- 작업 공간 모니터링: 작업 공간을 포인트 클라우드로 실시간 분석하여 작업자의 위치를 파악하고 안전을 확보.
- 동적 작업 할당: 로봇이 포인트 클라우드를 기반으로 작업 환경을 분석하고 동적으로 작업을 할당받아 수행.

사용 기술
- 포인트 클라우드 기반 공간 분석: 실시간 포인트 클라우드 데이터를 처리해 인간의 위치와 물체의 상태를 인식합니다.
- SI(System Integration): 로봇 협업 시스템을 구축하기 위해 센서, 로봇 컨트롤러, PLC, 그리고 사용자 인터페이스 등을 통합하여 원활한 동작을 구현합니다.
- 충돌 방지 알고리즘: 포인트 클라우드 데이터를 기반으로 작업 영역에서의 충돌을 예측하고, 로봇의 경로를 조정합니다.
- AI 기반 작업 분석: 머신러닝 모델을 사용해 작업자의 행동 패턴을 학습하고 작업 지원을 최적화합니다.
- ROS 및 산업용 SI 툴: ROS(Robot Operating System)를 기반으로 포인트 클라우드 데이터 처리와 로봇 움직임을 제어하고, 산업용 SI 툴을 활용해 다양한 기기와의 통합을 구현합니다.
마무리
포인트 클라우드 기술은 단순히 로봇에게 데이터를 제공하는 것을 넘어, 로봇이 환경과 정밀하게 상호작용할 수 있는 토대를 마련해줍니다. 자율 네비게이션에서부터 정밀 조작까지, 이 기술의 가능성은 끝이 없습니다. 앞으로 포인트 클라우드는 AI, IoT, 자동화 기술과의 융합을 통해 더욱 혁신적인 로봇 솔루션을 만들어낼 것입니다.
로봇이 만들어갈 미래가 궁금하신가요? 포인트 클라우드가 그 답을 알려줄지도 모릅니다. 😊
'개발지식 (이론) > 공부' 카테고리의 다른 글
| 포인트 클라우드(Point Cloud)란? (4) | 2020.11.10 |
|---|
'개발지식 (이론)/공부' Related Articles
more
